Our building blocks.
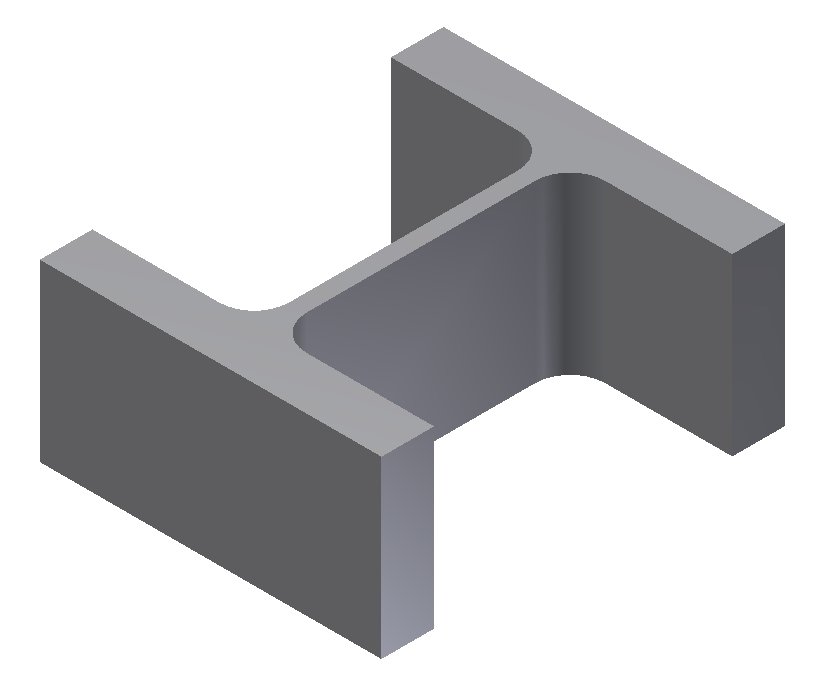
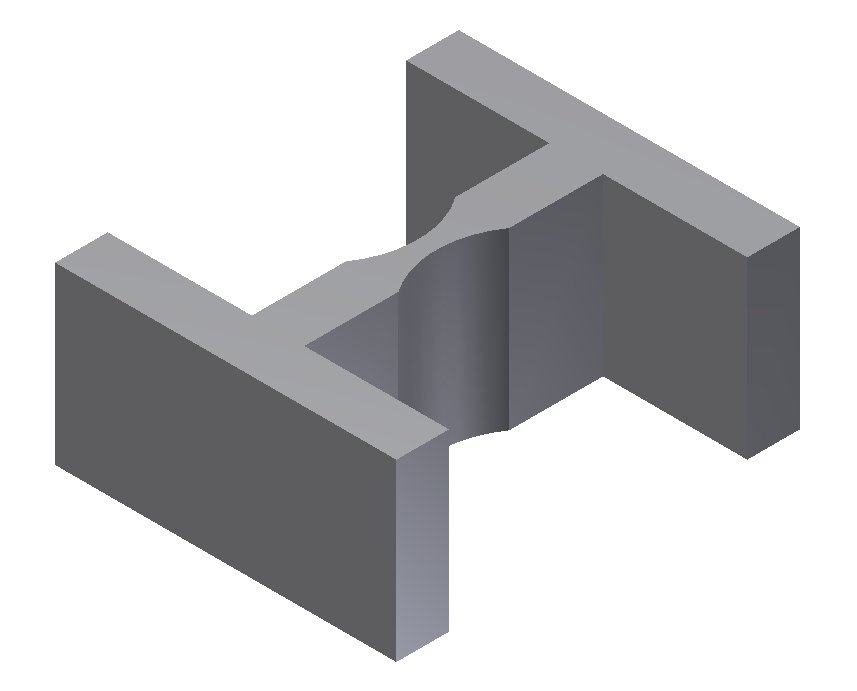
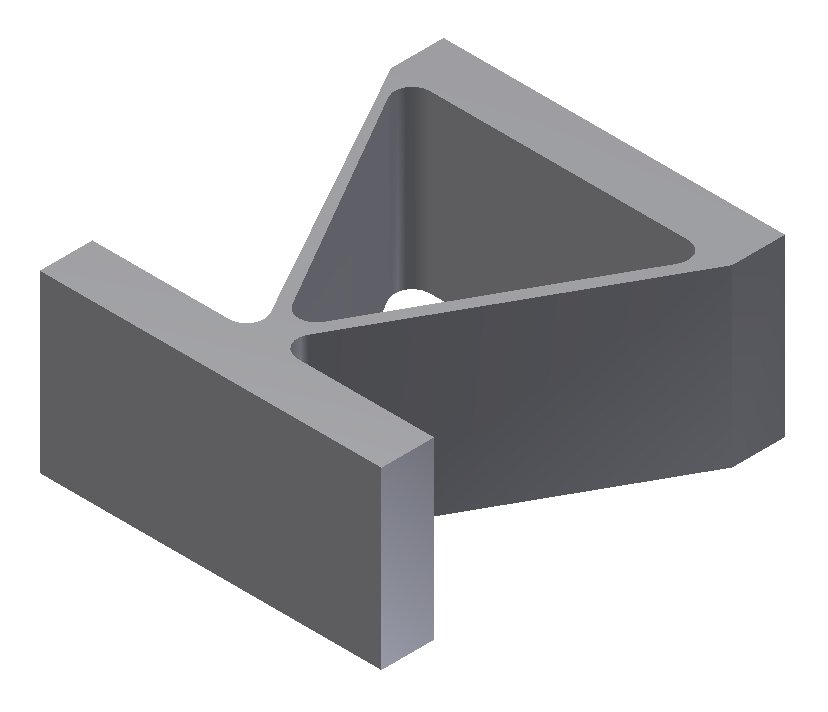
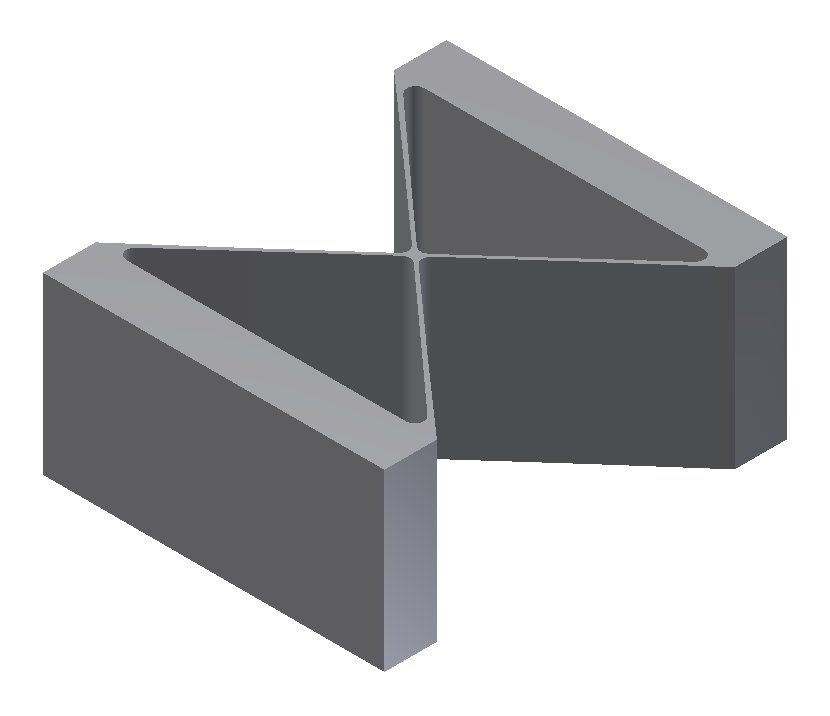
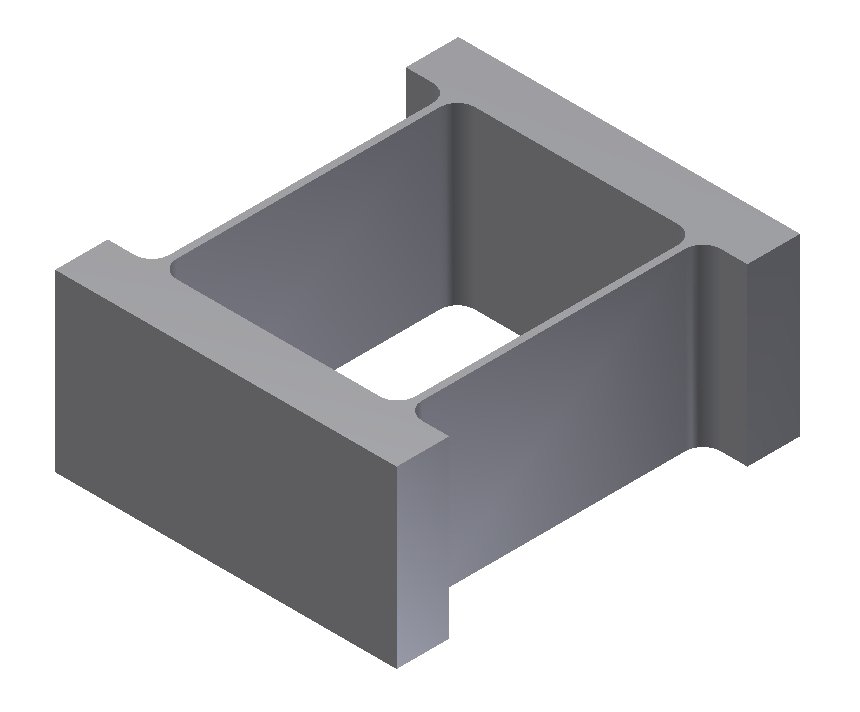
The simplest of compliant mechanisms is the integral pivot or solid state hinge. The idea behind it is to replicate the function of a conventional hinge or bearing, whilst using all of the advantages of solid-state kinematics. Most solid-state hinges are planar swivel joints, replacing a conventional single-value pivot bearing. They therefore allow for a designated swivel motion between two stiff sections, whereby they can be loaded up to a defined limit with both radial and axial force. There are, however, also solid-state hinges that are spatial and multivalent. Integral pivots form the foundational element of compliant mechanisms; within these mechanisms they are often found interacting with each other and with the stiff components.
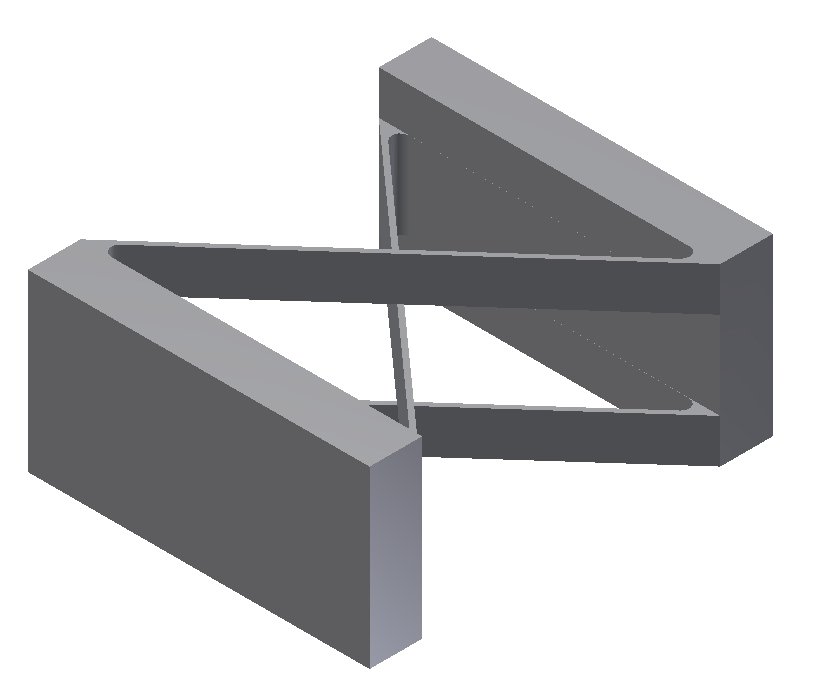
Elementary solid-state hinges are implemented as leaf springs or notch springs. In addition to this, there are also integrated high-performance pivots, which are implemented as compliant mechanisms in their own right e.g. the carwheel pivot joint or the parallel joint. For this reason, compliant mechanisms are typically built in a hierarchical manner. As it is not always clear-cut as to what is a mechanism and what is a joint, we often speak more generally of compliant systems.
The typical performance characteristics of a solid-state hinge are the allowable swivel angle or linear motion, the maximum load bear capacity normal to the movement and the accuracy of the path (the extent of unwanted deformation whilst loaded). The first two characteristics are not constant values, they are a function of the number of stress and movement cycles.
These are the most common types of joints: